
近几年来,人工智能的进步迅猛,技术如增强现实/虚拟现实、无人驾驶等对深度视觉技术的需求持续上升。在这一领域,深度摄像头作为关键产品,承担着获取三维数据的重要职责。那么,这类摄像头有哪些明显的特性和应用场景?
深度摄像头定义
深度摄像头是深度视觉技术中的关键设备。它和普通摄像头不一样,不仅能捕捉平面图像,还能给出物体的深度信息,比如物体的三维位置和体积。有了这项技术,计算系统能够获取到环境和物体的立体数据,就像给系统装上了“立体视觉”,使得系统能更准确地感知周围环境。
主流技术分类
深度摄像头根据技术类型主要可分为三类:结构光、双目视觉和TOF飞行时间法。每种技术都有其独到之处,就像三位风格各异的选手在深度视觉领域各展所长。这些技术让深度摄像头能更好地适应不同场景,各自在各自的应用领域大放异彩。
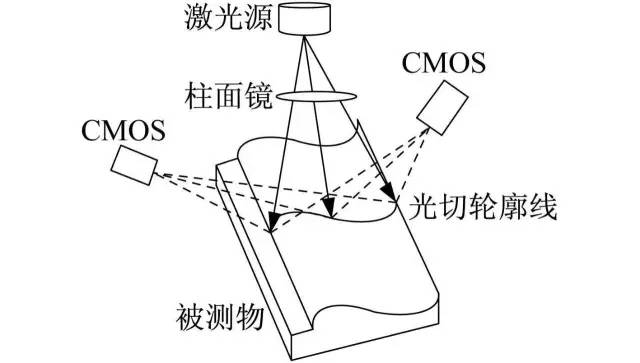
结构光技术
结构光技术是当下流行且广泛应用的深度感知技术。其运作机制是,通过结构光发射器向物体发射可调节的光点、光条或光面,随后图像传感器捕捉到的图像,利用系统内的几何关系和三角学原理来计算物体的三维位置。众多激光雷达和3D扫描设备都采用了这一技术,比如在工业检测领域,一些高精度的扫描设备就依靠结构光技术。这项技术特点突出,技术层面相当成熟。它能够识别较远的距离,而且深度图像的分辨率很高。不过,它对光线条件挺敏感的,尤其是在阳光强烈的时候,可能会出现性能波动的情况。
双目视觉技术
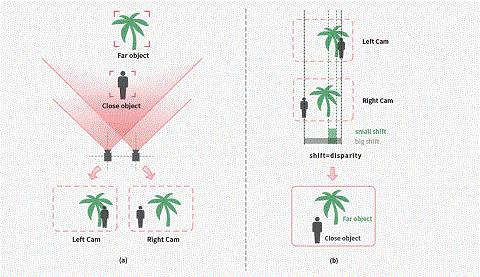
我们采用了双摄像头配置的双目视觉系统,该系统借助双目立体视觉成像技术,从两个摄像头中收集包括三维位置在内的数据,从而实现深度识别。这项技术已经在智能安防监控、机器人视觉、物流检测等多个行业得到广泛应用。在众多室外安防监控系统中,我们经常能看到它的身影。这种设备对环境光线影响不敏感,特别适合户外使用。它能全天候运作,而且费用不高。不过,这项技术对计算资源要求很高,对硬件也有特定要求。另外,在光线暗淡、背景复杂或存在障碍物时,它的表现并不出色。
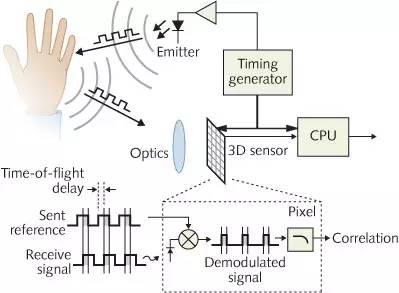
TOF飞行时间法技术
飞行时间技术,又称TOF技术。传感器会发出经过调整的近红外光。这些光遇到物体后,会反射。接着,传感器通过测量光发射与反射的时间差或相位差,计算出景物的距离,进而生成深度信息。此技术可与普通相机配合,将物体的三维形状以地形图形式呈现。这种设备可用于机器人、制造业、医疗技术和数码摄影等多个领域进行控制。它对环境的影响较小,反应敏捷,且能提供高精确度的深度信息。不过,因为传感器芯片技术尚未完善,导致成本较高,不易实现大规模生产。而且,它的分辨率相对较低,不适合对精度要求较高的场景。
广泛应用前景
深度摄像头应用广泛,工业领域用它来做高精度检测和生产管理;智能监控借助它更精准地追踪目标;物流方面,它能迅速完成货物的三维测量和定位;在AR/VR技术里,它还能带来更加逼真的沉浸体验。随着技术的不断进步,深度感知技术被越来越多地应用于各种场景。展望未来,我们或许会在许多意想不到的领域,看到深度摄像头展现出其强大的能力。
各位对哪种类型的深度摄像头技术未来发展持乐观态度?觉得其应用领域广泛吗?欢迎在评论区分享你们的看法。同时,记得点赞并分享这篇文章给更多人!